IIC 控制MPU6050 来实现姿态的读取
这个芯片已经是被用了很多年的芯片了,我收拾自己东西的时候发现有十几个模块,想必自己零零散散,想调试这颗芯片,但是却止步于开始。最近打算看看调试一下,算是弥补一下曾经的努力吧
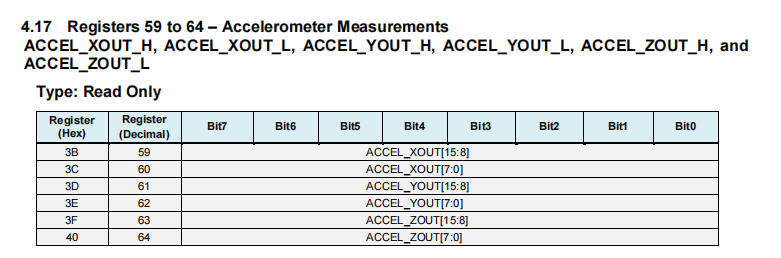
读取信息就是常规的调用函数,读取位置就好。 下面贴几个相关的寄存器信息
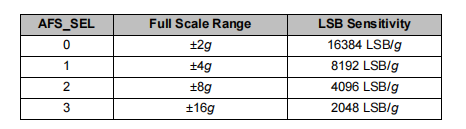
ACCEL 传感器
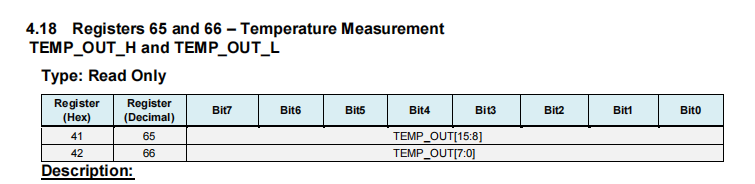
温度传感器

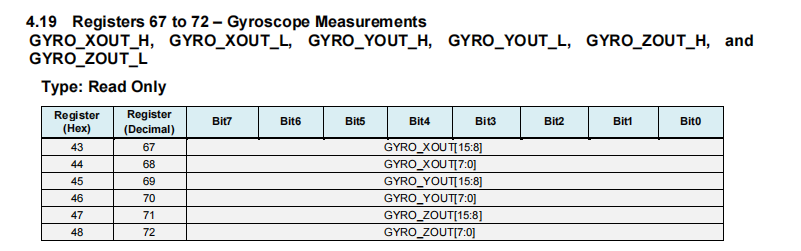
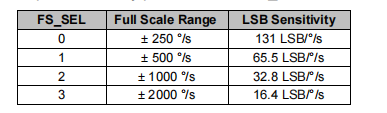
GYRO 寄存器
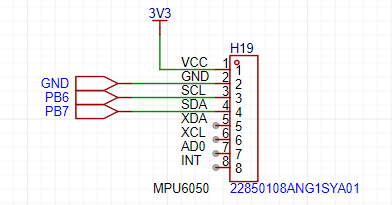
1. 硬件连接
如下图所示,和mpu6050模块连接,只需接2根IIC的线即可。
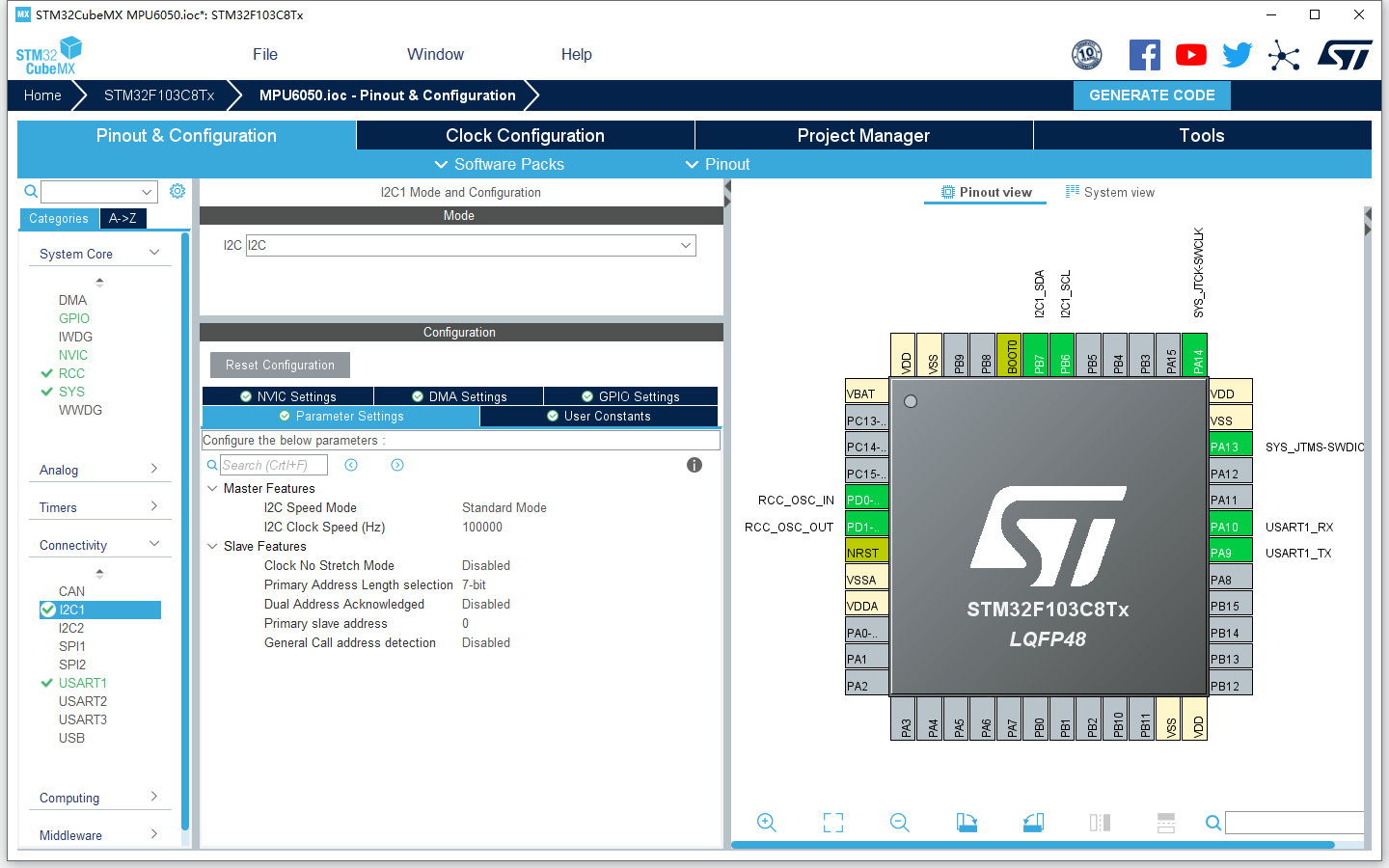
2. CubeMX生成代码
可以看到,配置了4个部分
- 外部时钟
- SWD 接口
- 串口输出
- IIC 通讯
3. 编写代码
3.1 串口打印相关函数
c
#include <stdio.h>
//重定向c库函数printf到串口USARTx,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口USARTx */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return (ch);
}
void ShowHex(uint8_t *buf,uint8_t len)
{
uint8_t i;
printf("hex = ");
for( i = 0; i < len; i++){
printf(" %02X",buf[i]); //使用前导0补齐
//printf(" %2X",buf[i]); //使用前导空格补齐
//printf(" %X",buf[i]); //输出最短的16进制格式
}
printf( "\r\n");
}3.2 MPU芯片初始化的代码
2024年3月21日 现在的这个版本比较简陋,需要后续完善一些信息。但基本功能能够实现,先上传来保存一份
c
void MPU6050_INIT()
{
//延时
HAL_Delay(100);
uint8_t SendAddress = 0x6b;
uint8_t SendData = 0x00; //解除休眠状态
HAL_I2C_Mem_Write(&hi2c1,0xD1,SendAddress,1,&SendData,1,0xff);
SendAddress = 0x19;//采样率分频器
SendData = 0x07;
HAL_I2C_Mem_Write(&hi2c1,0xD1,SendAddress,1,&SendData,1,0xff);
SendAddress = 0x1A;//低通滤波器
SendData = 0x06;
HAL_I2C_Mem_Write(&hi2c1,0xD1,SendAddress,1,&SendData,1,0xff);
SendAddress = 0x1B;//陀螺仪
SendData = 0x08; //± 500 °/s
HAL_I2C_Mem_Write(&hi2c1,0xD1,SendAddress,1,&SendData,1,0xff);
SendAddress = 0x1C;//加速度计
SendData = 0x00; //± 2g
HAL_I2C_Mem_Write(&hi2c1,0xD1,SendAddress,1,&SendData,1,0xff);
}3.3 main函数
main函数主要实现了IIC的读取,以及处理,打印相关数据,整个代码实现了将采集的信息真实的打印出来,后面计算角度还需要再增加相关代码,后续再写一篇吧
c
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
uint8_t MPU_Data[] = {0X00, 0X00,0X00, 0X00,0X00, 0X00,0X00, 0X00,0X00, 0X00,0X00, 0X00,0X00, 0X00};
uint8_t preg1_Data = 0x3B;
double ACCEL_XOUT = 0.0,ACCEL_YOUT =0.0,ACCEL_ZOUT=0.0;
double GYRO_XOUT = 0.0,GYRO_YOUT =0.0,GYRO_ZOUT=0.0;
MPU6050_INIT();
while (1)
{
HAL_I2C_Mem_Read(&hi2c1, 0xD1,preg1_Data,I2C_MEMADD_SIZE_8BIT,MPU_Data,14,50);
//ShowHex(MPU_Data,14);
float Temp = (MPU_Data[6]<<8)|MPU_Data[7];
if(Temp>32768) Temp-=65536;
Temp=(36.53+Temp/340);
short int ACCEL_XOUT1 = ((MPU_Data[0]<<8)|MPU_Data[1]);ACCEL_XOUT = (double)ACCEL_XOUT1/16384;
short int ACCEL_YOUT1 = ((MPU_Data[2]<<8)|MPU_Data[3]);ACCEL_YOUT = (double)ACCEL_YOUT1/16384;
short int ACCEL_ZOUT1 = ((MPU_Data[4]<<8)|MPU_Data[5]);ACCEL_ZOUT = (double)ACCEL_ZOUT1/16384;
short int GYRO_XOUT1 = ((MPU_Data[8]<<8)|MPU_Data[9]);GYRO_XOUT = (double)GYRO_XOUT1/65.5;
short int GYRO_YOUT1 = ((MPU_Data[10]<<8)|MPU_Data[11]);GYRO_YOUT = (double)GYRO_YOUT1/65.5;
short int GYRO_ZOUT1 = ((MPU_Data[12]<<8)|MPU_Data[13]);GYRO_ZOUT = (double)GYRO_ZOUT1/65.5;
//printf("temp = %0.2f",Temp);
printf("x= %0.2f,y= %0.2f,z= %0.2f",GYRO_XOUT,GYRO_YOUT,GYRO_ZOUT);//加速度计
//printf("x= %0.2f,y= %0.2f,z= %0.2f",ACCEL_XOUT,ACCEL_YOUT,ACCEL_ZOUT);//陀螺仪
printf("\r\n");
HAL_Delay(200);
}
}4. 后记
6050 这个芯片已经是停产的芯片了,在新的设计中则不推荐使用,但是作为学习而言,其资料相对丰富,算是一个还可以的选择
这个芯片很早就买了,感觉像是一座高山一样挡在前面,什么卡尔曼滤波,什么四位元数,有空还是得好好整理这个资料,弥补一下自己曾经的努力吧